
1、基本概念
极大连通、极小连通、极大连通子图、极小连通子图、连通分量
无向图
-
极大连通
在无向图中,指的是任意两点都有直接或者间接的路径
-
极小连通
在无向图中,生成树就是一个极小连通;如果加一条边就会形成一个环,如果减一条边就会出现孤立的节点;n个节点应该有n-1条边
-
极大连通子图和极小连通子图
满足上述极大连通和极小连通的子图
-
连通分量
指的是极大连通子图的数目
-
思考:假如一个图有n个节点
如果边数小于n-1的话,此图必定是非连通图
非连通图最多应该有 条边 ,解释:由n-1构成完全图,如果此时再加入一条边,那么就会形成连通图了
强连通图、强连通分量、弧
有向图
-
弧
弧头:有箭头的那一端
弧尾:无箭头的那一端
-
强连通图
有向图中,任意两个顶点都有直接或者间接的路径到达(注意,路径是有方向的),此图称为强连通图
-
强连通分量
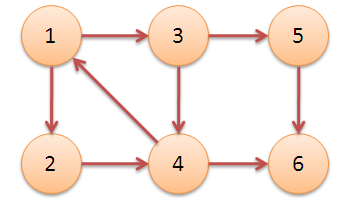
有向图的强连通子图的数量就是强连通分量,书上是说‘有向图的极大连通子图就是强连通分量’
如下图所示,三个强连通分量 {1,2,3,4}, {5},
-
思考:假如有n个节点的有向图
强连通情况下,至少需要n条边;解释:构成一个环就行了,这样,任意两点直接都可循环到达。
生成树与最小生成树
-
生成树
无向图和无向图图,若的所有顶点,且边是的子集,那么
生成树不唯一
维基百科如下图定义

-
最小生成树
每条边都有权值,最小生成树就是最后生成的树,权值和最小
2、图的存储
邻阶矩阵
- 有向图:节点i到节点j有权重为m的边,那么零阶矩阵中
- 无向图:节点i到节点j有权重为m的边,那么零阶矩阵中
- 零阶矩阵中出现为0或者∞的情况就是,对应于不带权图与带权图中没有边
邻阶表
设有n个节点,则存在长度为n的指针数组(下标从1开始)
下标为i的指针指向了一个链表,这个链表依次是节点i指向的节点(有向图)或者节点i连接的节点(无向图)。
十字链表(有向图)
-
弧节点:tailvex, headvex, hlink, tlink, info
tailvex: 指向弧尾的节点的指针
headvex: 指向弧头的节点的指针
hlink:指向弧头相同的下一条弧节点
tlink:指向弧尾相同的下一条弧节点
info:指向弧的信息
-
顶点节点:data, firstin, firstout
data:存放数据信息
firstin:指向第一个以该节点为弧头的弧节点
firsstout:指向第一个以该节点为弧尾的弧节点
领接多重表(无向图)
-
边节点:mark, ivex, ilink, jvex, jlink, info
mark: 标志域,表示该条边是否被搜索过
ivex,jvex:指向该边依附的两个顶点
ilink,jlink:指向下一条依附ivex,jvex的边
info:指向信息域
-
顶点节点: data, firstedge
data:该节点的信息
firstedge:指向第一条依附于该节点的边
3、广度搜索和深度搜索
深度优先搜索与深度搜索树/森林
时间复杂度
- 领接表:
- 领接矩阵:
空间复杂度
广度优先搜索与广度优先搜索树/森林
时间复杂度
- 领接表:
- 领接矩阵:
空间复杂度
4、最小生成树算法(无向图)
Prim算法
时间复杂度:只跟节点数有关,与边无关。
我原称之为:大孤岛算法,也就是所有的节点是孤岛,然后依次把每个节点加入到大孤岛中来。
步骤:
- 1、从节点开始,加入到该 “大孤岛” 中
- 2、寻找 “大孤岛” 相连 最小权值 的边,该边连接的节点加入 “大孤岛” 中
- 3、重复2,直到所有的节点都加入了 “大孤岛” 中
Kruskal算法
时间复杂度:只跟边数有关,与节点数无关。
我原称之为:多孤岛算法,也就是把所有的节点看作一个孤岛,然后依次寻找两个孤岛之间最小的边,将两个孤岛连接成一个孤岛
可以使用并查集
步骤:
- 1、找到一条最小权值的边,该条边满足连接着两个 “孤岛” ,不是两个节点哦
- 2、将上述两个孤岛变成一个孤岛
- 3、重复1、2两步
5、最短路径算法
Dijkstra算法
时间复杂度:,只跟节点数有关
不适用于有负权边
求解单源路径最短问题(即,节点到所有节点的最短路径)
步骤:
-
参数介绍:
-
flag数组:标志当前节点是否找到了最短的路径
-
dist数组:长度
-
path数组:上一个节点
-
初始化:flag全都是false,path全都是-1,dist全都是无穷大
-
-
从出发,找到的所有出边,将权值加的dist填入dist数组,path数组都填
-
然后从
dist数组中找到最小的一条边且flag为false,下标就是下一个节点 -
从上一步来的,的
flag变成true,然后找到所有出边,依次更新出边的节点,如果发现从会更加小,那么就更新path和dist- 重复第2、3步,直到
flag全都是true
- 重复第2、3步,直到
Floyd算法
时间复杂度:,只跟节点数有关
适用于有负权边,但不适用于有负权回路边
求解两两节点之间最短路径
步骤:
-
参数介绍:
A矩阵:从节点
i到j的最短路径path矩阵:从节点
i到节点j的中转节点初始化:A矩阵为邻阶矩阵,path矩阵为-1
-
从出发,依次求解到的最短路径
如求的最短路径
- 依次找以作为中转节点,路径是否更小,更小就更新A和path矩阵
-
重复上述步骤
6、拓扑排序与关键路径(AOV与AOE)
AOV(有向无权图),拓扑排序
顶点:事件;边:无关紧要;
时间复杂度:
- 领接表:
- 零阶矩阵:
方法1、步骤:(正拓扑序)
- 找入度为0的节点,写入排序数组
- 删除上面所找的节点以及连接他们的出边
- 重复上述两步,直到图空了;如果第一步已经找不到了,但是图不空,说明有回路,拓扑排序失败
方法2、步骤:(逆拓扑序)
- 找出度为0的节点,写入排序数组
- 删除上面所找的节点以及连接他们的入边
- 重复上述两步,直到图空了;如果第一步找不到,但是图不空,说明有回路,拓扑排序失败。
AOE(有向带权图),关键路径
顶点:事件;边:活动
需要能够拓扑排序
时间复杂度:因为是利用拓扑排序来求的,所以跟拓扑排序一样,没有验证
步骤:
-
直接找起点到重点最长的路径,可能有多条
-
参数介绍:
- ve数组、vl数组:事件(节点)最早、最晚发生时间
- e数组、l数组:活动(边)最早、最晚发生时间
- l-e数组:l数组减去e数组,为0表示这个是关键路径上的一条边
- ve、vl数组长度与节点数一样,然后初始化为0即可
- e、l、l-e数组长度与边数一样,初始化为0即可
-
处理ve数组
- 从起点开始:起点对应的值为0
- 依次找起点的出边,然后出边对应的节点为,并且出边的弧头的ve值为起点的ve值加边权值
- 的ve值是:所有的入边弧头ve的 最大值 ,然后依次找的出边,出边弧头对应的ve是的ve加边权值
- 重复上面步骤
-
处理vl数组
- 从终点开始:终点对应的vl值是终点的ve值
- 依次找终点的入边,然后入边对应的节点为,并且入边的弧尾的vl值尾起点的vl值减去边权值
- 的vl值是:所有的出边弧尾ve的 最小值 ,然后依次找的入边,入边弧尾对应的ve是的ve减去边权值
- 重复上面步骤
-
处理e数组:为弧尾对应的ve值
-
处理l数组:为弧头对应的vl值减去该弧的权值
-
处理l-e数组:l数组减去e数组即可
如何加快整体工程的进度:
- 加快所有关键路径的进度
7、Graphviz简单介绍
Graphviz是用来可视化图和树的工具,常用.dot文件或者api进行操作,官网链接。
用法一、dot文件使用
目前还不会使用这个软件,先挖坑。